tools:stickyfrontuv
This is an old revision of the document!
Table of Contents
Sticky Front UV
This node performs front projection mapping (classic and perspective camera only).
Optionally it may directly output the UV coordinates to be used in a compositing application for texture mapping. The front projection may happen in releation to the item position at a reference time and will then stick as the item is moved. However, displacements (including due to bones) are not taken into account.
Controls
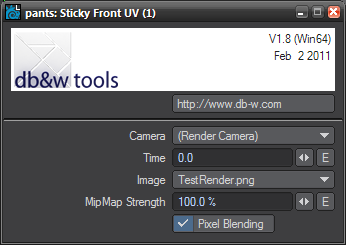
- Camera The camera to use as a reference for the front projection
- Time Reference time for the front projection, the image will be mapped as if the surfaces where in the position at that time (not taking displacements into account).
- Image The image to map
- MipMap Strength The mip-map strength when mapping the image, higher values cause the image to be more blurry.
- Pixel Blending performs an interpolation on the image pixels when mapping.
Outputs
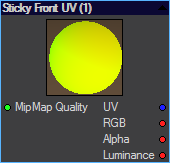
- UV The UV coordinates as a vector, U is stored in X, V in Y, Z is empty. This can easily be hooked up as a colour to export for compositing.
This is independent of the mapped image. In fact, no image needs to be selected for the UV output to function. - RGB, Alpha, Luminance Respectively the colour, alpha or luminance of the mapped image.
tools/stickyfrontuv.1382012815.txt.gz · Last modified: by lightwolf